
描述
| 硬件平台 | 力覺傳感器 |
| 通信接口 | TCP/UDP/串口 |
| 碰撞檢測最高精度 | 10N |
| 恆力跟踪最高精度 | 1N |
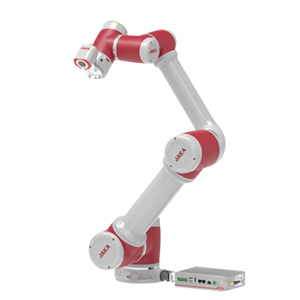
配置工業級力覺傳感器(在機器人末端或底座集成力控傳感器);
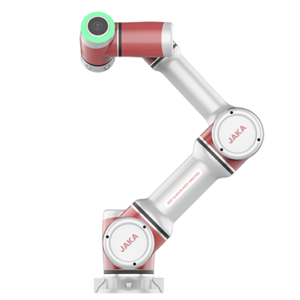
自重41.3kg,負載12kg,工作半徑達到1327mm;
更高載荷,更大工作半徑,替代繁重的體力搬運工作,兼顧部署靈活性和使用便捷性;
提供更好的人機交互體驗和安全保障;
提供恆力、法向跟踪和速度模式等多種力控解決方案。
| 硬件平台 | 力覺傳感器 |
| 通信接口 | TCP/UDP/串口 |
| 碰撞檢測最高精度 | 10N |
| 恆力跟踪最高精度 | 1N |
| 機械臂 | 工作範圍 | 最大速度 |
| 關節1 | ±360° | 120°/s |
| 關節2 | -85°,+265° | 120°/s |
| 關節3 | ±175° | 120°/s |
| 關節4 | -85°,+265° | 180°/s |
| 關節5 | ±360° | 180°/s |
| 關節6 | ±360° | 180°/s |
| 工具端最大速度 | / | 3m/s |
| 功耗 | 500W |
| 溫度範圍 | 0-50℃ |
| IP等級 | IP54 |
| 機器人安裝 | 任意角度安裝 |
| 工具I/O端口 | 數字輸入2/數字輸出2/模擬輸入1 |
| 工具I/O電源 | 24V |
| 底座直徑 | 188mm |
| 材質 | 鋁合金、PC |
| 工具I/O尺寸 | M8 |
| 機器人連接電纜長度 | 6m |
| 包裝箱尺寸 | 875×580×520(mm)(L×W×H) |
| 有效負載 | 12kg |
| 重量(含電纜) | 41.3kg |
| 工作半徑 | 1327mm |
| 重複定位精度 | ±0.03mm |
| 自由度 | 6 |
| 編程 | 圖形化編程、拖拽編程 |
| 示教器類型 | 移動終端(PAD/手機)APP |
| 協作操作 | 根據GB 11291.1-2011進行協作操作 |
| 通過認證 | CR認證、CE認證、15066認證 |